Flexradio serie 6000 y LINUX
En el momento de escribir esta entrada no hay aun un software de control para LINUX similar el SmartSdr para los transceptores FlexRadio de la serie 6000.
En el foro de Flexradio vi el anuncio de 2 utilidades para linux que permitían la comunicacion CAT y de Audio (DAX) desde un ordenador linux
Uso LINUX como ordenador principal desde finales del siglo pasado, He de confesar que mi ordenador con Windows es única y exclusivamente para operar con el Fexradio 6400M.
Se trata de 2 pequeños programas disponibles para PC y raspberry PI .
Instalación
nDax, este programa se comunica con el equipo Flexradio y crea 2 dispositivos de audio uno en TX y otro en RX
Ncat similar al Ndax pero permite la comunicacion CAT (control del equipo) con el Transceptor Flexradio.
Podemos descargar los ejecutables de nDAX aqui y nCAt aqui
hay 2 versiones una para Raspberry Pi (arm) y otra para PC
Yo lo he probado con Ubuntu 20.04.3 LTS y ha funcionado a la primera.
nDax
una vez descargado el ejecutable, le cambiamos los permisos:
chmod 755 nDAX-linux-amd64El comando es muy simple
./nDAX-linux-amd64 -station EA3KZ -slice A -daxch 1 -source flex.sliceA.rx -sink flex.sliceA.tx
Parámetros:
station, es el nombre del equipo
slice del equipo por defecto A
daxch canal Dax por defecto 1
source texto nombre del dispositivo de Puse audio de recepción
sink texto nombre del dispositivo de Puse audio de transmisión
Usage of ./nDAX-linux-amd64:
-daxch string
DAX channel # to use (default "1")
-latency float
Target RX latency (ms, higher = less sample rate variation) (default 100)
-log-level string
minimum level of messages to log to console (trace, debug, info, warn, error) (default "info")
-packet-buffer int
Buffer n (max 6) packets against reordering and loss (default 3)
-radio string
radio IP address or discovery spec (default ":discover:")
-rt
Attempt to acquire realtime priority (default true)
-sink string
PulseAudio sink for audio to transmit (default "flexdax.tx")
-slice string
Slice letter to use (default "A")
-source string
PulseAudio source for received audio (default "flexdax.rx")
-station string
station name to bind to (default "Flex")
-tx
Create a TX audio device (default true)
-udp-port int
udp port to listen for VITA packets (0: random free port)
nCat
una vez descargado el ejecutable, le cambiamos los permisos:
chmod 755 nCat-linux-amd64En este caso solo hay que pasar un parámetro el nombre del equipo.
./nCat-linux-amd64 -station EA3KZComandos disponibles:
Usage of ./nCAT-linux-amd64:
-headless
run in headless mode
-listen string
hamlib listen [address]:port (default ":4532")
-log-level string
minimum level of messages to log to console (default "info")
-profile string
global profile to load on startup for -headless mode
-radio string
radio IP address or discovery spec (default ":discover:")
-slice string
slice letter to control (default "A")
-station string
station name to bind to or create (default "Flex")
Uniendo todo
Este es el script que uso para iniciar los 2 programas
flex_linux.sh
#!/bin/bash
FLEX_STATION=EA3KZ
./nDAX-linux-amd64 -station ${FLEX_STATION} -slice A -daxch 1 -sink flex.sliceA.rx -source flex.tx &
./nCAT-linux-amd64 -station "${FLEX_STATION}" -listen :4532 &
Podemos ejecutar varias copias del programa para acceder a mas de un receptor
simultáneamente en el directorio scripts del github de estos programas hay unos ejemplos.
El nombre del equipo (FLEX_STATION) lo podemos ver en el SmartSDR en:
Settings -> Radio Setup -> Radio ->Callsing
En los modelos M o en el MAESTRO en:
MENU -> Radio -> Callsing
copiar
nDAX-linux-amd64
nCat-linux-amd64
flex_linux.sh
chmod 755 flex_linux.sh
en el mismo directorio
y ejecutar./linux_flex.sh
seguidamente ejecutar el programa de control CAT, digitales o Log que deseamos usar.
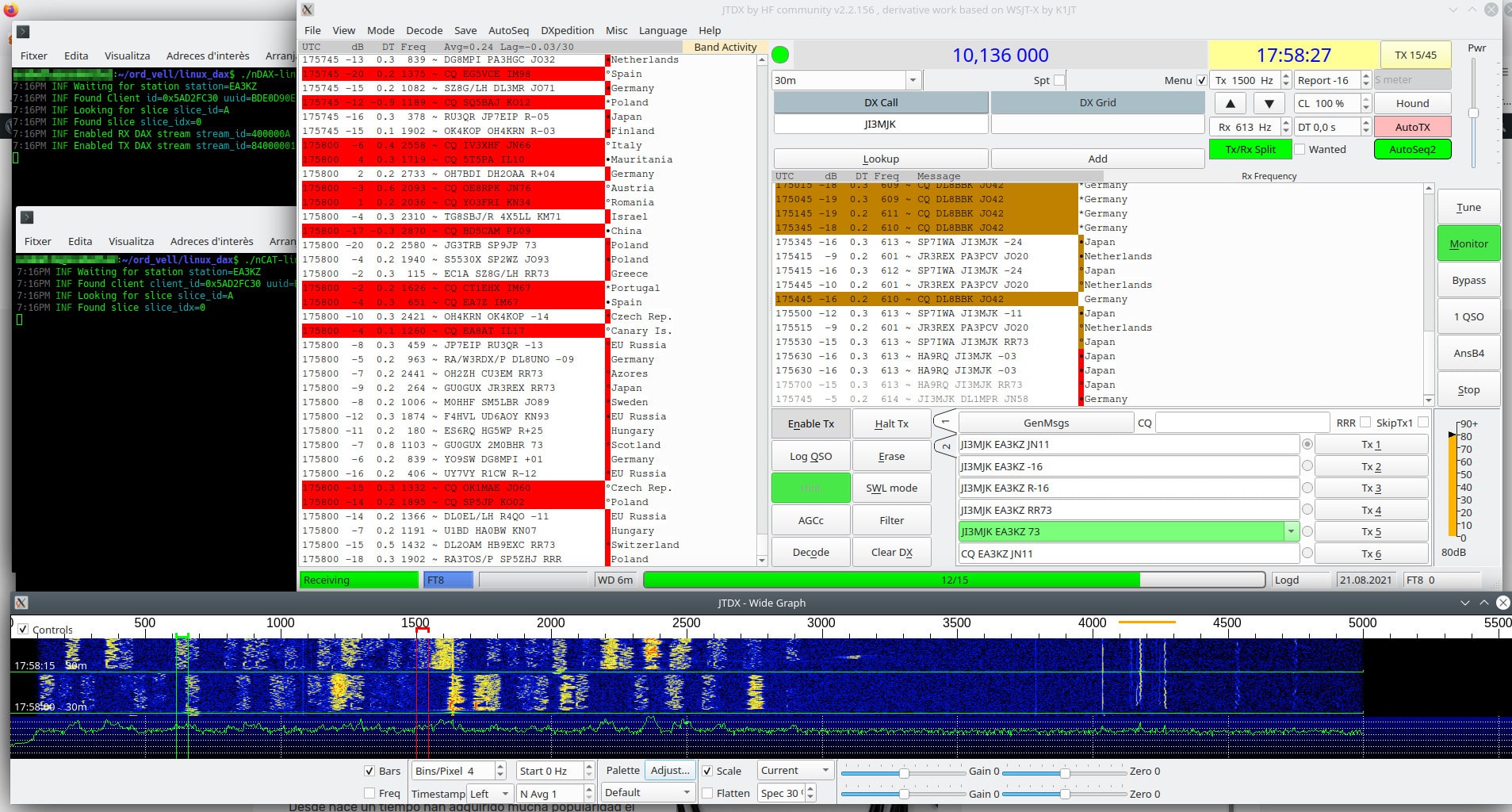
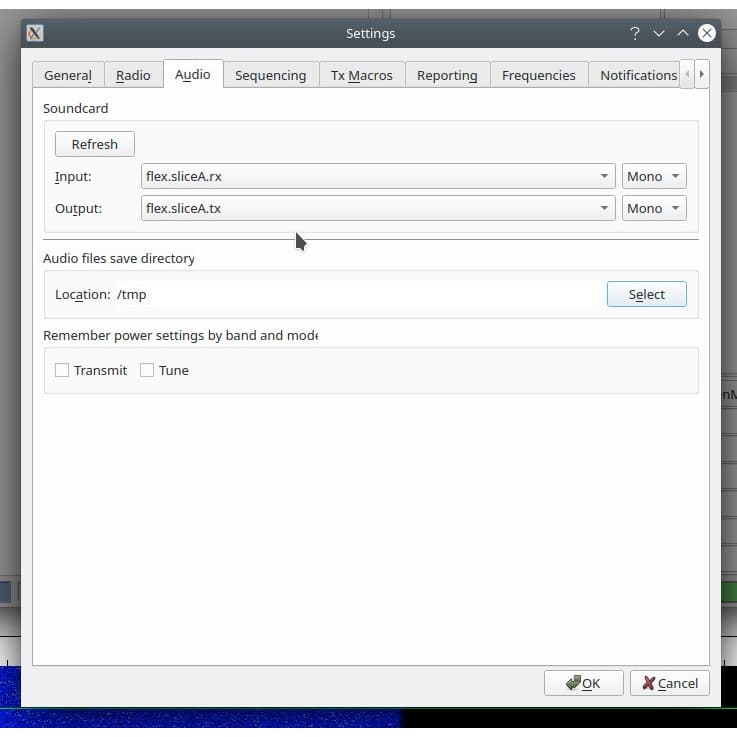
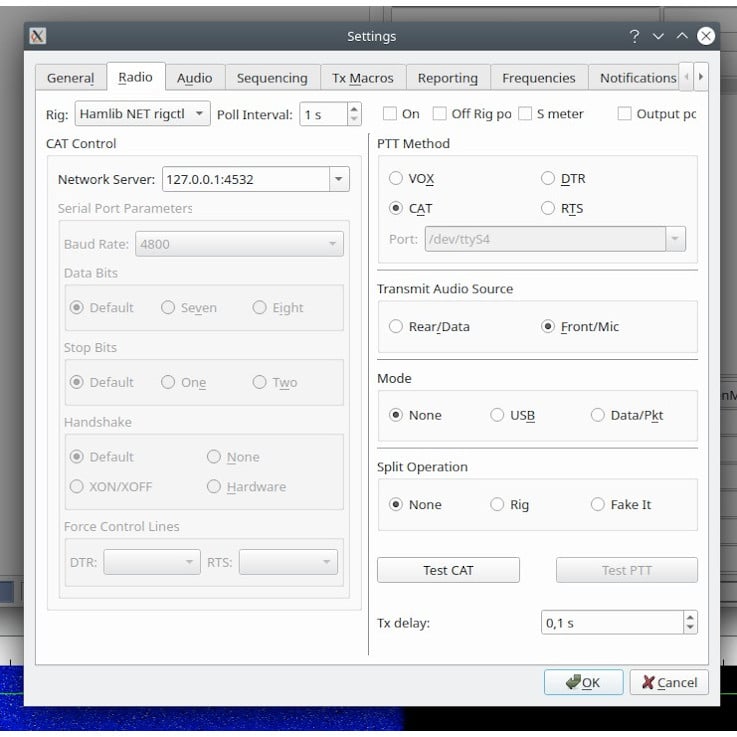
Configuración JTDX
La configuración es la misma para el wsjt-x
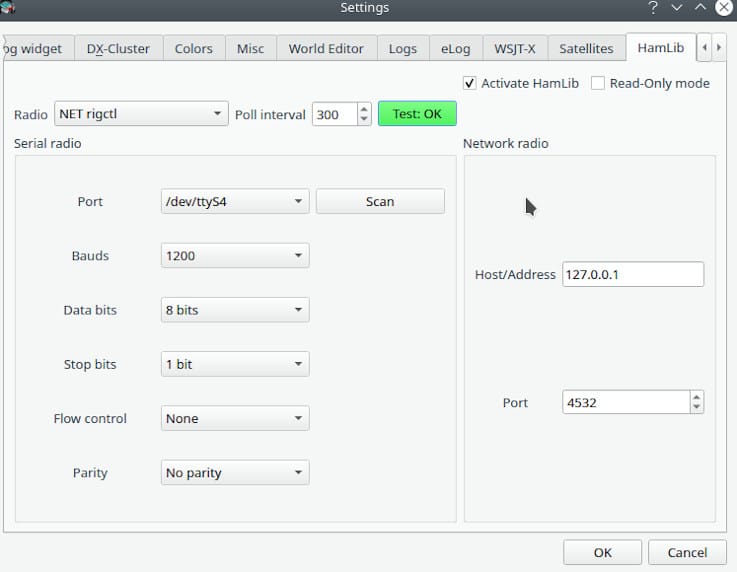
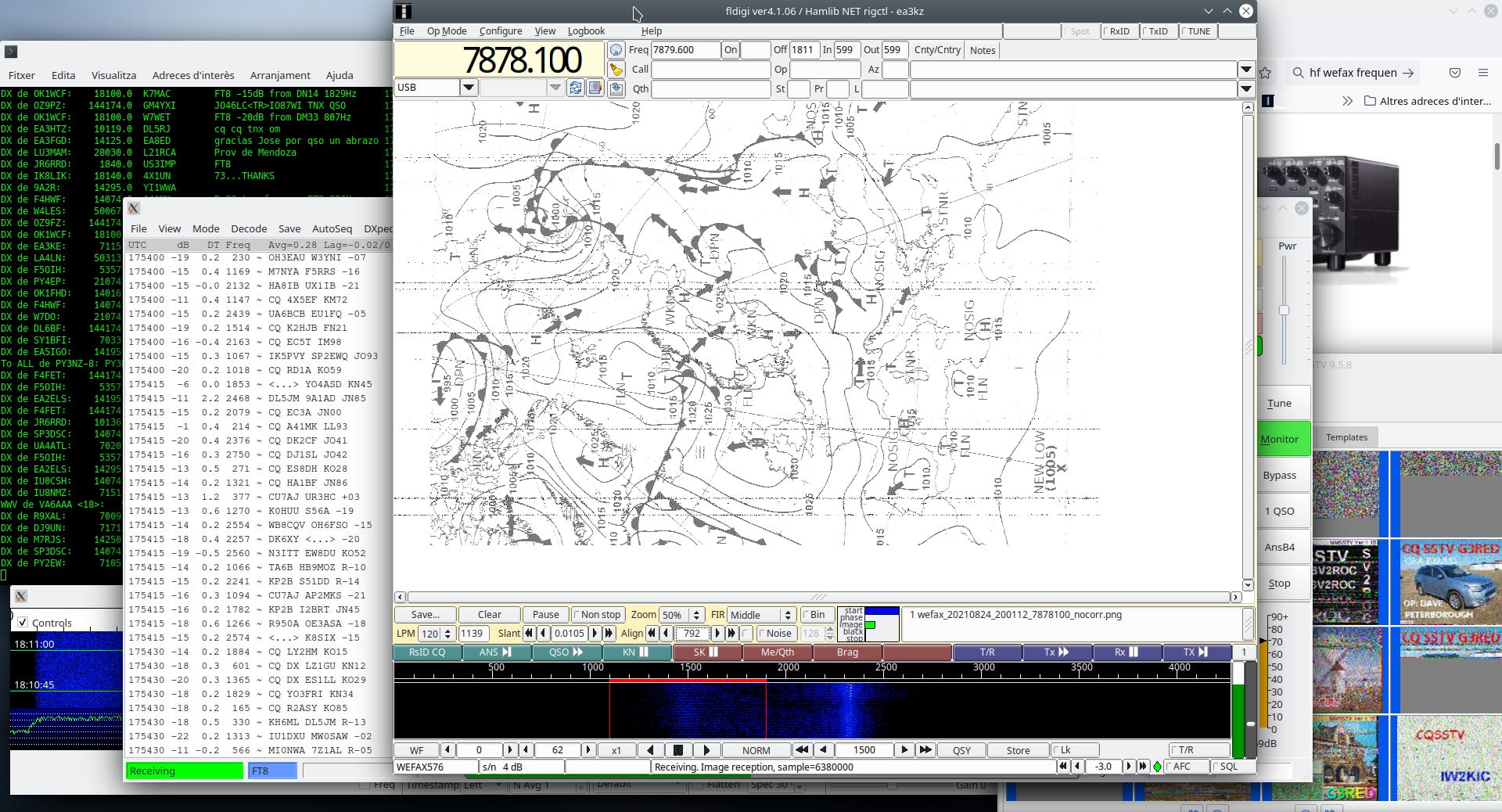
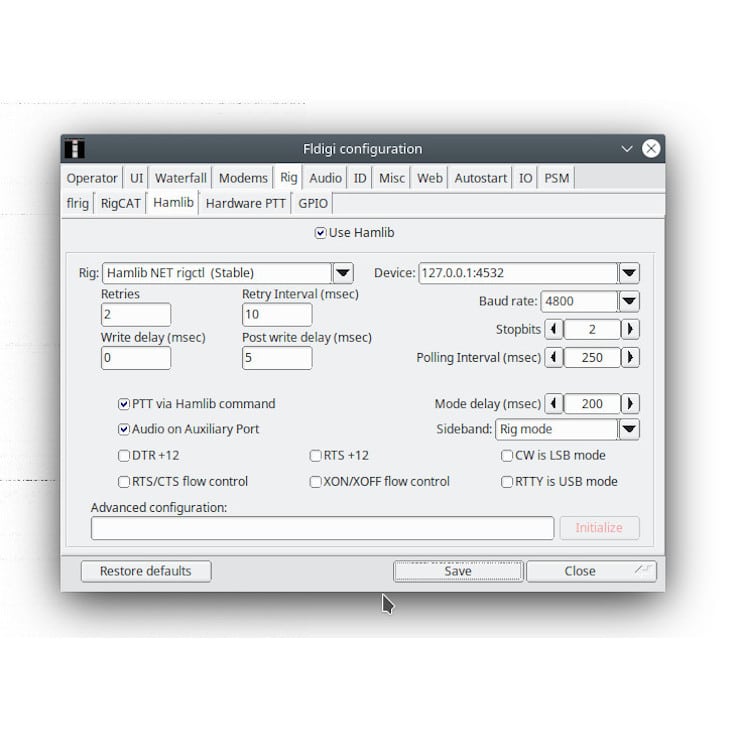
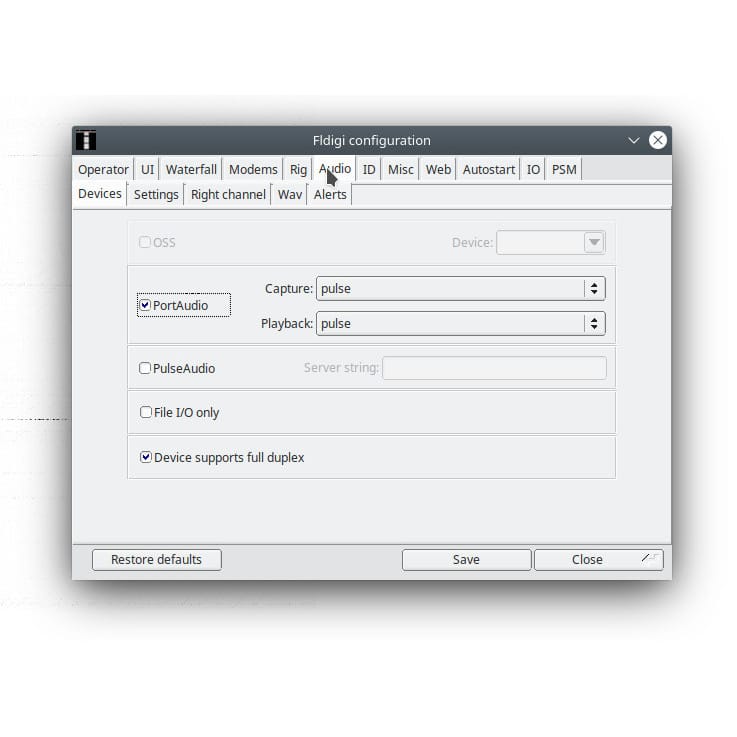
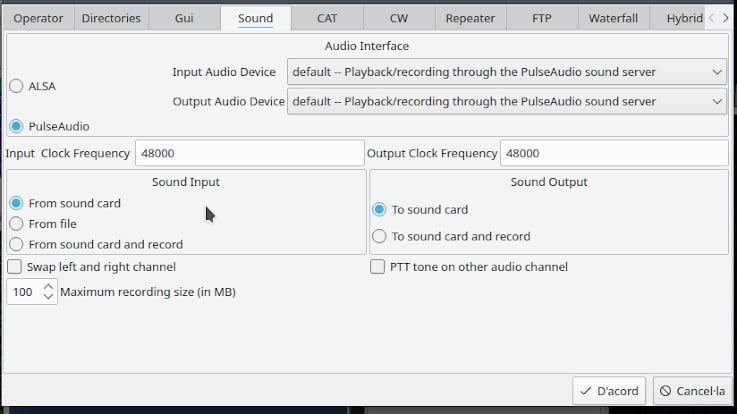
Configuración FLDIGI
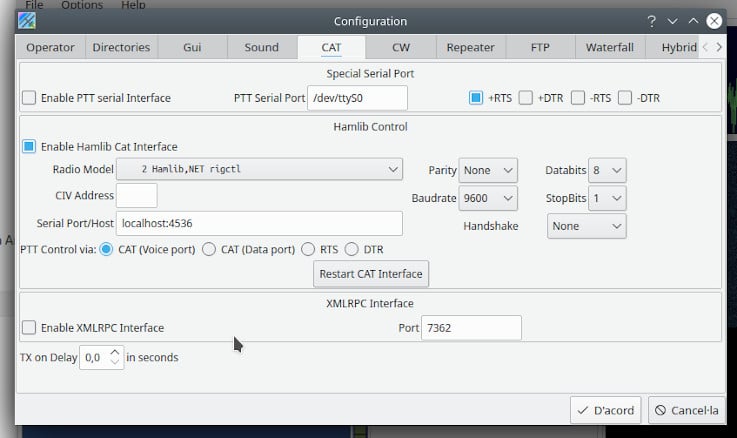
QSSTV
KLOG